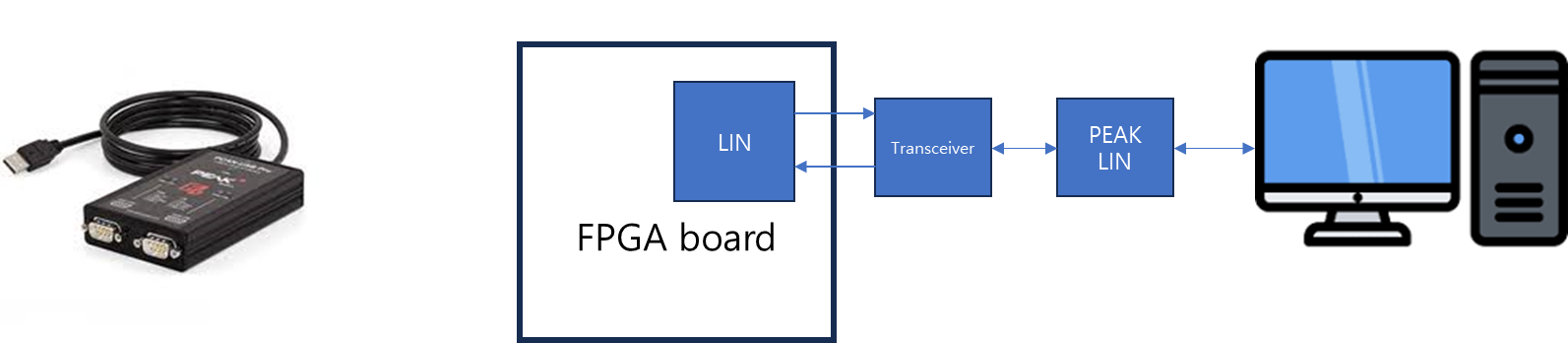
- LIN 검증 환경 세팅 이제 LIN 검증의 마지막 파트입니다. 지금까지는 제가 설계한 LIN controller끼리 연결해서 data transfer test를 진행했는데요, 다른 LIN controller랑 연결을 해봐야겠죠?? 저는 PEAK 사의 PCAN USB PRO FD(이하 PLIN)으로 LIN 검증을 진행했습니다. PLIN이 있어도 제어 프로그램이 있어야 하겠죠?? PEAK 홈페이지에서 설치 파일을 다운로드할 수 있습니다. https://www.peak-system.com/PCAN-USB-Pro-FD.366.0.html?&L=1 해당 파일을 다운로드하고 설치를 진행하는 과정에서 LIN device driver 옵션을 반드시 설정해야 LIN 제어 프로그램을 사용할 수 있습니다. PLIN을 P..