LIN은 overload를 막기 위해 schedule tabe을 통해 모든 통신을 진행합니다.
- Time base
한 Frame에는 Header와 Response가 있고 최대 8-byte 통신이 가능하다고 했습니다. 한 Frame 통신당 걸리는 시간이 정해져 있는데, time base를 기반으로 정해집니다.

한 Frame이 진행되는 시간은 time base의 n배이고, 통상적으로 time base는 5ms 또는 10ms입니다. 그러니까 LIN이 굉~~장히 느리다는 거죠.
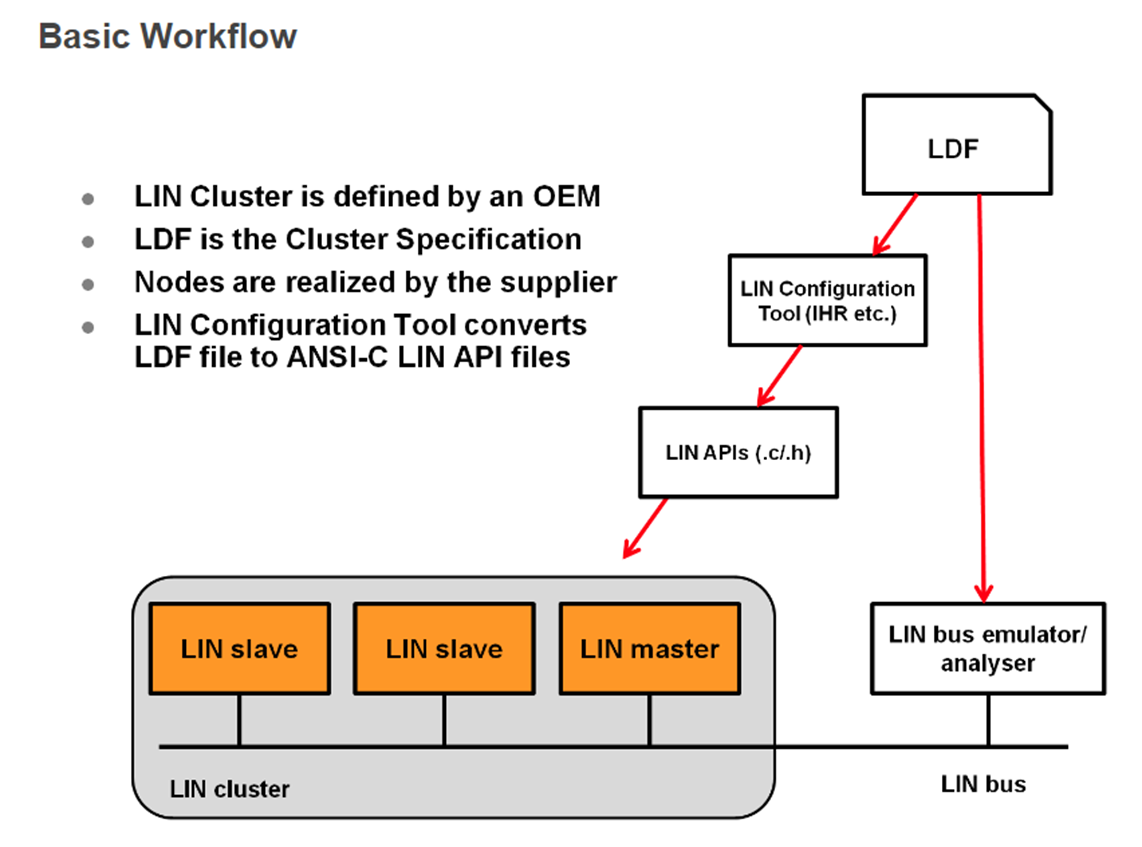
이전에 LIN protocol overview에서 PID를 통해 모든 통신을 정의한다고 했는데요, LDF 파일을 통해 모든 통신이 사전에 정의됩니다.
2023.10.04 - [Ch1 Seminar/IP] - LIN overview (1) Protocol
LIN overview (1) Protocol
오늘날의 자동차는 단순히 이동 수단이 아니라 여러 가지 기능이 있습니다. 이를 구현하기 위해서 자동차에는 내부 통신 규격이 필요한데요, 대표적으로 CAN과 LIN이 있습니다. 이 글에서는 LIN에
veriln-e.tistory.com
이 LDF파일을 기반으로 api를 짜고 이를 통해 LIN controller를 제어하는 겁니다.
- LDF format
<LIN_description_file> ::=
LIN_description_file ;
<LIN_protocol_version_def>
<LIN_language_version_def>
<LIN_speed_def>
(<Channel_name_def>)
<Node_def>
(<Node_composition_def>)
<Signal_def>
(<Diag_signal_def>)
<Frame_def>
(<Sporadic_frame_def>)
(<Event_triggered_frame_def>)
(<Diag_frame_def>)
<Node_attributes_def>
<Schedule_table_def>
(<Signal_groups_def>)
(<Signal_encoding_type_def>)
(<Signal_representation_def>)기본적으로 LIN protocol 버전과 Node 정보, signal과 Frame, 마지막으로 실제 통신이 진행되는 순서인 Schedule table로 구성됩니다.
1. Global definition
<LIN_protocol_version_def> ::=
LIN_protocol_version = char_string ;
<LIN_language_version_def> ::=
LIN_language_version = char_string ;
<LIN_speed_def> ::=
LIN_speed = real_or_integer kbps ;
<Channel_name_def> ::=
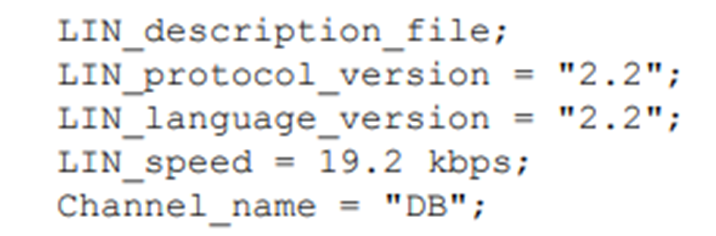
Channel_name = identifier ;Global definition에서는 LIN 버전과 통신속도, 그리고 채널 이름을 정합니다.
2. Node definition
다음으로 Node를 정의하는데요, 여기서 통신에 참여하는 Master와 Slave들이 정해집니다.
<node_def> ::=
Nodes {
Master: <node_name>, <time_base> ms, <jitter> ms ;
Slaves: <node_name>([, <node_name>]) ;
}
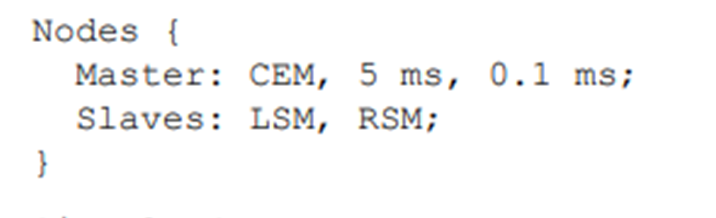
위의 예시에는 Master가 CEM이고 Slave로 LSM/RSM 두 개를 사용하네요. Time base가 5ms이므로 한 Frame 당 5,10,15,20...ms가 걸릴 것으로 예상됩니다.
<node_attributes_def> ::=
Node_attributes {
[<node_name> {
LIN_protocol = <protocol_version> ;
configured_NAD = <diag_address> ;
(initial_NAD = <diag_address> ;)
<attributes_def> ;
}]
}
<attributes_def> ::=
product_id = <supplier_id>, <function_id> (, <variant>) ;
response_error = <signal_name> ;
(fault_state_signals = <signal_name>([, <signal_name>]) ;)
(P2_min = real_or_interger ms ;)
(ST_min = real_or_interger ms ;)
(N_As_timeout = real_or_integer ms ;)
(N_Cr_timeout = real_or_integer ms ;)
<configurable_frames_20_def> | <configurable_frames_21_def>Node attribute를 통해 상세한 정보를 기술합니다. 특히, product_id는 Diagnostic frame(PID: 0x3C or 0x3D)에 필요합니다.

'Ch1 Seminar > IP' 카테고리의 다른 글
| LIN overview (4) LIN 검증 (0) | 2023.12.08 |
|---|---|
| LIN overview (3) Schedule table - 2 (0) | 2023.10.30 |
| LIN overview (2) Sleep, Wake up (0) | 2023.10.11 |
| LIN overview (1) Protocol (0) | 2023.10.04 |
| UART 통신 overview (0) | 2023.07.26 |